 火星網校
火星網校
3D立體拍攝後期剪輯



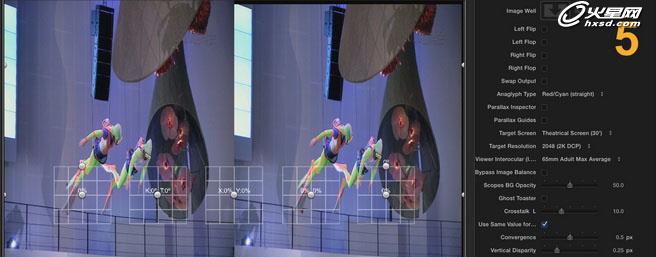

但這裏有一個前提,那就是在套嵌之前,需要手工將LR進行對位,也就是出入點要絕對一致;這裏為什麼還需要手工對位呢?
1、如果采用3D立體攝錄一體機拍攝的素材,比如索尼TD300立體攝像機,那麼這個LR素材是不需要進行對位的,LR雙路視頻永遠是一致的。




下一篇 好萊塢電影剪輯大師的創作理念
-

2101期學員李思庭作品
-

2104期學員林雪茹作品
-

2107期學員趙淩作品
-

2107期學員趙燃作品
-

2106期學員徐正浩作品
-

2106期學員弓莉作品
-

2105期學員白羽新作品
-

2107期學員王佳蕊作品



相關文章
多種教程 總有一個適合自己專業問題谘詢
你擔心的問題,火星幫你解答-
為給新片造勢,迪士尼這次豁出去了,拿出壓箱底的一眾經典IP,開啟了夢幻聯動朱迪和尼克奉命潛入偏遠地帶臥底調查 截至11月24日......
-
此前Q2問答環節,鄒濤曾將《解限機》首發失利歸結於“商業化保守”和“灰產猖獗”,導致預想設計與實際遊玩效果偏差大,且表示該遊戲......
-
2025 Google Play年度遊戲頒獎:洞察移動遊戲新趨勢
玩家無需四處收集實體卡,輕點屏幕就能開啟驚喜開包之旅,享受收集與對戰樂趣庫洛遊戲的《鳴潮》斬獲“最佳持續運營遊戲”大獎,這不僅......
-
說明:文中所有的配圖均來源於網絡 在人們的常規認知裏,遊戲引擎領域的兩大巨頭似乎更傾向於在各自賽道上激烈競爭,然而,隻要時間足......
-
在行政服務優化層麵,辦法提出壓縮國產網絡遊戲審核周期,在朝陽、海澱等重點區將審批納入綜合窗口;完善版權服務機製,將遊戲素材著作......
-
未畢業先就業、組團入職、紮堆拿offer...這種好事,再多來一打!
眾所周知,火星有完善的就業推薦服務圖為火星校園招聘會現場對火星同學們來說,金三銀四、金九銀十並不是找工作的唯一良機火星時代教育......
